The human fingertip is a highly sensitive organ for sensing objects in our surroundings through touch. According to a new research published in the journal Cell Reports Physical Science, a team of Chinese scientists has created a bionic finger with an integrated tactile feedback system capable of prodding complicated objects to map out features beneath the top layer.
“We were inspired by human fingers, which have the most delicate tactile perception we are aware of,” said Wuyi University co-author Jianyi Luo. “When we touch our own bodies with our fingertips, for instance, we can feel not just the texture of our skin but also the contour of the bone beneath it. This tactile technology enables nondestructive non-optical testing of the human body and flexible electronics.”
According to the authors, artificial touch sensors used in the past could only perceive and discriminate between external shapes, surface textures, and hardness. Yet, they cannot detect subsurface information about these compounds. This typically needs optical technologies, such as CT scanning, PET scanning, ultrasonic tomography (which scans the exterior of a substance in order to recreate an image of its inside structure), or MRIs. All of these, however, have disadvantages. Similarly, optical profilometry is frequently used to assess the profile and quality of a surface, although it is only applicable to transparent materials.
When we touch anything with our fingertips, the skin undergoes mechanical deformation, such as compression or stretching, which causes mechanoreceptors to transmit electrical impulses. These impulses proceed to the somatosensory cortex of the brain via the central nervous system. The brain combines these electrical impulses in order to recognise the characteristics of the thing we touch. This tactile feedback allows us to identify the form, surface roughness, and hardness or softness of a material.
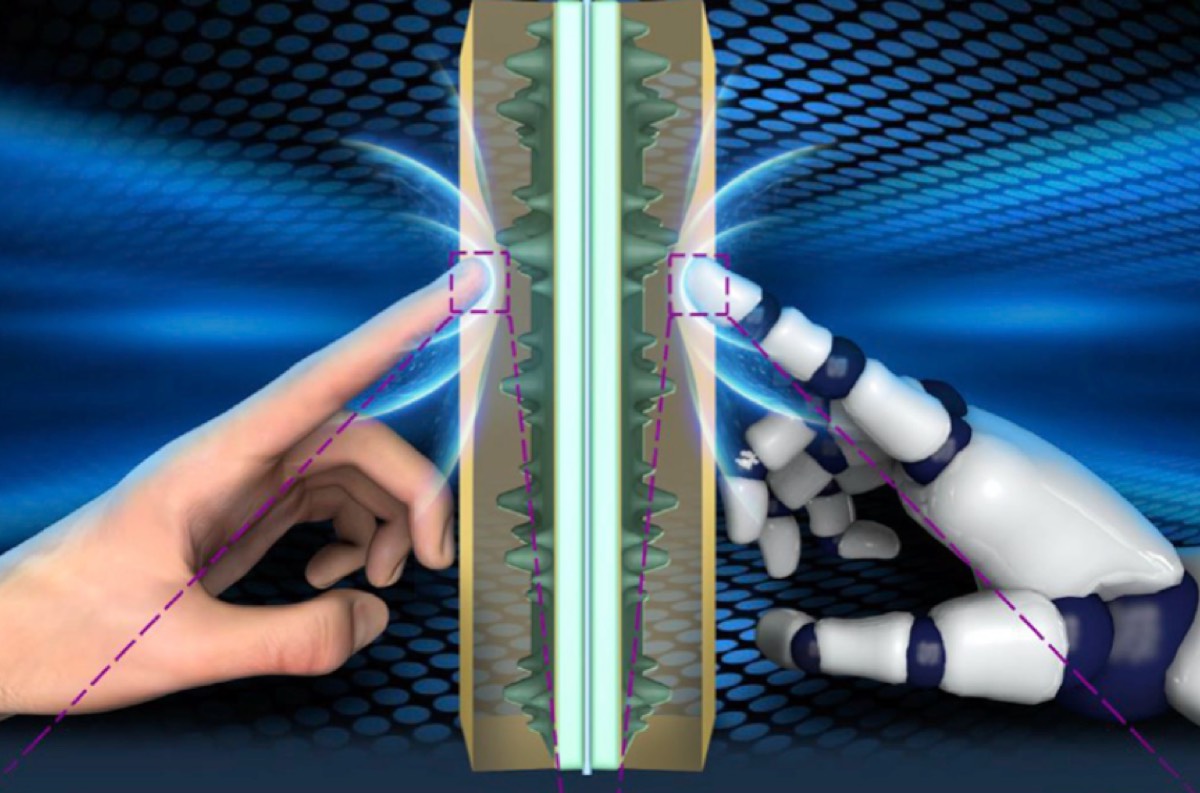
The intelligent bionic finger emulates this feedback system. A copper cylinder set atop the finger acts as the contact point, while carbon fibre beams function as tactile mechanoreceptors (the sensing unit). They are connected to a module for signal processing. The finger “scans” the surface of the target object by regularly exerting pressure, similar to a prod or poke. This compresses the carbon fibres, and the amount of compression reveals the material’s relative stiffness or pliability. This information, together with its location on the surface, is then transmitted to a computer, which converts the data into a 3D map.
The writers tested their bionic finger utilising several difficult objects. For example, scientists examined the finger’s capacity to recognise and map a stiff letter “A” immediately beneath a soft silicon layer, as well as other abstract shapes (see video). Even the fingertips could distinguish between hard and soft interior elements and the soft silicone coating on the exterior.
In addition, they 3D-printed a physical model of human tissue using three layers of hard polymer (for the “skeleton”) and an outer layer of soft silicone (for the “muscles”). The bionic finger successfully scanned and replicated a 3D profile of the structure of the model tissue, including the position of a “blood vessel” placed beneath the “muscle” layer.
Lastly, the authors tested the bionic finger on a malfunctioning electronic gadget and successfully mapped its internal components. The finger was able to determine where the circuit had been severed and identify a hole that had been poorly drilled without penetrating the surrounding outer layer. “Next, we’d like to develop the bionic finger’s ability for omnidirectional detection using various surface materials.”
Related Articles:
Next month, Microsoft Teams 2.0 Will Reportedly Be Faster.
India Adopts New Android OEM Rules Revenue Sharing should replace Requirements
India Adopts New Android OEM Rules Revenue Sharing should replace “Requirements